Multi-loop identification
When controlling an airplane the pilot perceives the kinematics of the airplane in different ways. For instance, he sees the motion due to changes in the outside visual scene or a display and he feels the motion with his vestibular organ in the inner ear or from sensors in his skin. Modelling and identification of the way the pilot uses these cues to fulfill his task have been the subject of many studies. The models are of great importance for the design of airplanes, the design of simulators and the assessment of simulator fidelity.
Experiments
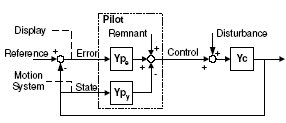 Two methods are used to identify a multi-loop pilot model, with two feedback paths: central visual feedback of the error and motion feedback of the state. Both for two kind of task: the disturbance task where the error is the opposite of the state and the target following task where the error is the difference of the state with a varying desired state.
Two methods are used to identify a multi-loop pilot model, with two feedback paths: central visual feedback of the error and motion feedback of the state. Both for two kind of task: the disturbance task where the error is the opposite of the state and the target following task where the error is the difference of the state with a varying desired state.
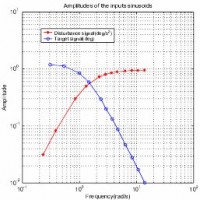
The first method uses a single forcing function to disturb the system (disturbance task) or the display (target task); a single-loop method. To be able to compare the pilot responses correctly the same open-loop error PSD in the disturbance task as for the target task is needed. Therefore the signal used for the disturbance task was that of the target task multiplied with the inverse dynamics of the controlled dynamics. For the double integrator dynamics this results in a high frequent disturbance signal, or high frequent accelerations. Especially for these accelerations the SIMONA Research Simulator is essential. The method results in a single response function to which the multi-loop model can be fitted.
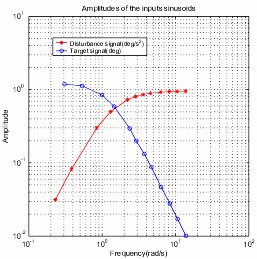
The second method combines the two signals in a single experiment. This results in a combined task, to reproduce the two tasks and be able to compare them the power of the signal that does not describe the task is halved. Still difference in total control behavior with the single-loop method might occur. This multi-loop method gives two response functions, one of the motion feedback and one of the display feedback. The model of each feedback can be fitted to the corresponding response function.
Results
To predict the results of the experiments a simulation was made, this helped in the design of the experiment and finally showed promising results of the methods. First test showed that the presumed pilot models where reasonably good, at least for the single-loop methods. It can be expected that in the single-loop experiments for the disturbance task the performance improves due to the closure of the inner-loop, for the target task this probably will not happen, because this would reduce performance (inner-loop closure reduces the state not the error). In the multi-loop experiment closure of the inner-loop in the target task is more likely because also a disturbance signal is present
References
[1] Kaljouw, W. J., M. Mulder and M. M. van Paassen, “Multi-loop Identification of Pilot’s Use of Visual and Motion Cues”. AIAA 2004-5443. Presented at the 2004 Modeling & Simulation Technologies Conference, Providence, Rhode Island, USA, 16 – 19 Aug 2004.