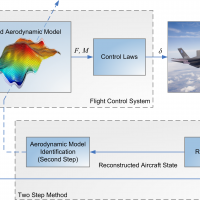
Fault Tolerant Control (FTC) methods are aimed at providing new levels of damage resilience to aircraft, spacecraft, and drones. Two different approaches are investigated: model-based and sensor-based methods. Model based FTC methods use an onboard model of the aircraft aerodynamics to derive the control laws. When structural damage occurs, this onboard model may no longer be accurate, and as a result, the control laws will no longer be optimal, and could even cause the system to become unstable. To solve this issue, an online system identification routine is running in the loop which updates the onboard model to reflect the changed (aero) dynamics. The picture below shows a high level overview of a model based FTC method.
A unique method that was developed at our group is the Spline based Adaptive Nonlinear Dynamic Inversion, or SANDI, method. SANDI combines the very high resolving power of the multivariate splines with an adaptive control allocation scheme which is resilient to aerodynamic uncertainties. The SANDI method can locally adapt the aerodynamic model without destroying the global model features. Current research is focused on improving the robustness of SANDI under external disturbances such as gust and turbulence. The picture below shows a general overview of the SANDI controller architecture.

An alternative FTC approach is the model-free or sensor-based approach. Examples of this approach are the Incremental Nonlinear Dynamic Inversion (INDI), Incremental Backstepping (IBS), and Sensor-Based Backstepping (SBB). An advantage of the incremental methods is that only a model of the control effectiveness is required, but no complete aerodynamic model. Instead, measurements or estimations of the angular accelerations are required, and a model of the time delays in the control system must be identified. The incremental and sensor-based methods require a very precise time synchronization between the incremental control input (Delta u) and the control reference, which is a focus of current research. The picture below shows the architecture of a sensor based FTC method for the Boeing 747.

The video below shows a comparison between classical control, standard NDI control, and a Sensor Based NDI controller. The comparison is made using the RECOVER benchmark and the Flight 1862 scenario.
