
Improved measurements of simulation motion states by combining data from multiple sensors.
Modern vehicle simulators used for the purposes of training and research typically rely on various robotic mechanisms to provide a sense of motion similar to that experienced in the real vehicle. The most commonly applied motion platform in flight simulation is the Stewart platform, also known as a hexapod system. This mechanism consists of a platform supported by six linear actuators moving in a synergistic fashion to provide motion in six degrees-of-freedom.
An example of such a platform is the Simona simulator at TU Delft, shown in Fig. 1 together with a schematic representation. In order to be able to accurately control the motion of the platform and in order to obtain reliable knowledge on the quality of the generated motion cues, measuring the kinematic state of the motion platform is of great interest. In current practice, the inference of such knowledge relies mainly on the isolated use of actuator length measurements and on, in certain cases, on-platform inertial sensors.
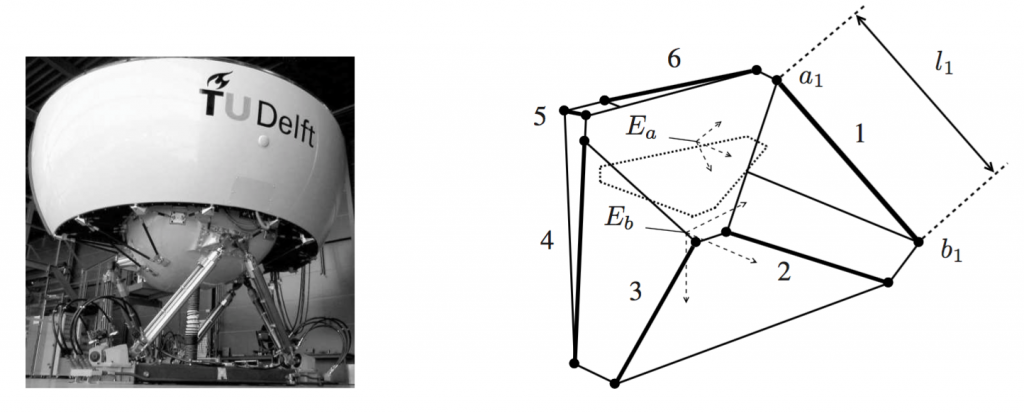
Fig. 1: the Simona simulator (left) and a schematic of a Stewart platform (right).
The goal of this project is to develop, implement and evaluate a novel and improved method for the reconstruction of the kinematic state of a Stewart platform. This method relies on the fusion of on-platform inertial sensors with measurements of the six actuator lengths using the Unscented Kalman Filter (UKF). A real-time implementation of the algorithm in DUECA was realised and executed on the Simona flight simulator. Initial results indicate that the algorithm is superior to existing methods in two main areas. First, more accurate estimates of velocity are obtained and, second, the algorithm is robust to inherent measurement uncertainties like noise and bias.
