Improving the accuracy of hydraulic hexapod flight simulator motion system, in existence of parameter uncertainties and external disturbances.
For current high performance research and training flight simulator motion systems, Stewart platform, also known as hexapod systems, are widely used due to the advantages of high stiffness and accuracy, as well as their simplicity. As relatively large forces are applied with actuators of flight simulators, hydraulic actuators dominated high payload simulators for the past decades, owning to their rapid response, high loading capabilities and smoothness. The control schemes on the motion system largely decide the performance of the simulators. Figure 1 shows a general control structure for such systems, which is cascaded into an inner-loop force controller and an outer-loop motion controller
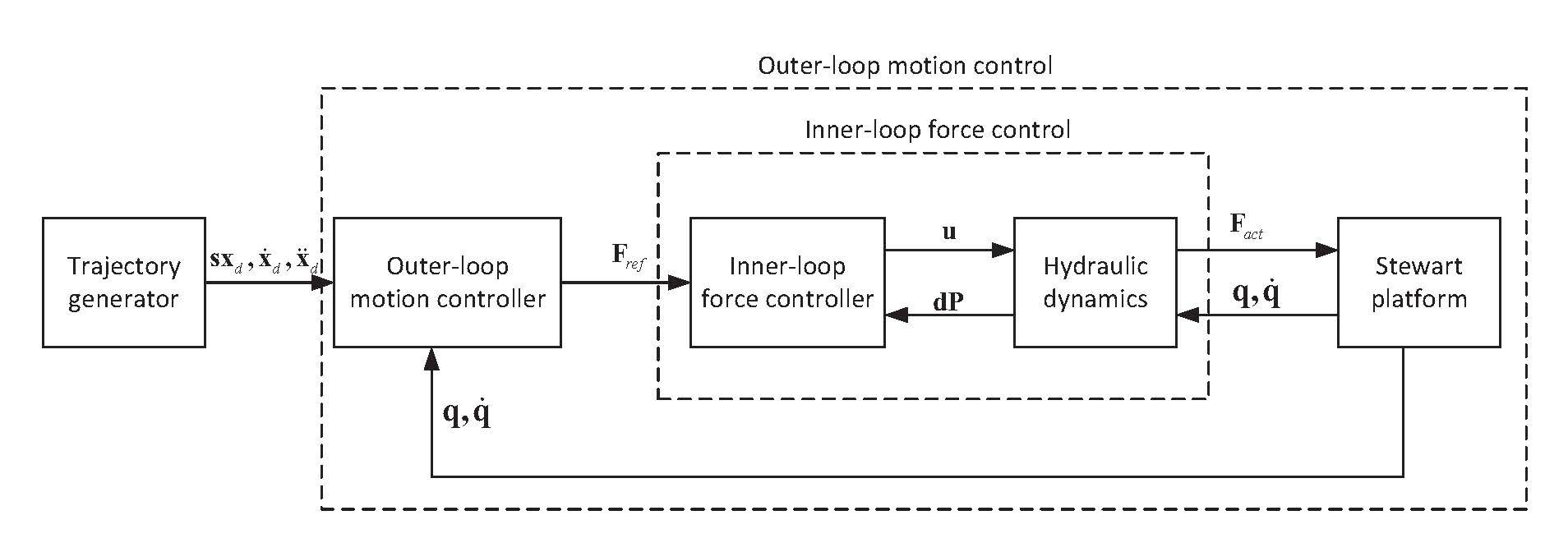
Figure 1. Cascade control architecture for hydraulic parallel robots
Hydraulic systems, as well as hexapod robotic systems, are highly nonlinear and suffer seriously from model and parametric uncertainties, which will significantly degrade the performance of traditional model-based nonlinear controllers such as nonlinear dynamic inversion. The goal of this project is to apply an innovative sensor-based controller, known as incremental nonlinear dynamic inversion, to the studied systems. The proposed control technology uses less model information and is inherently insensitive to model uncertainties, with assumptions of accurate state measurement and high sampling rate. With a successful implementation, significant improvement of motion control performance of the motion system is expected in existence of model mismatches. The fidelity of flight simulation will thus be improved. The research work includes the development of a detailed fully nonlinear model for a hydraulic hexapod motion system, the development of the sensor-based robust controller for the hydraulic force tracking subsystem as well as the general parallel robotic systems, and the real world implementation of the proposed control system to the SIMONA Research Simulator.
