Data-driven and assumption-free selection of the optimal human control model structure and response dynamics.
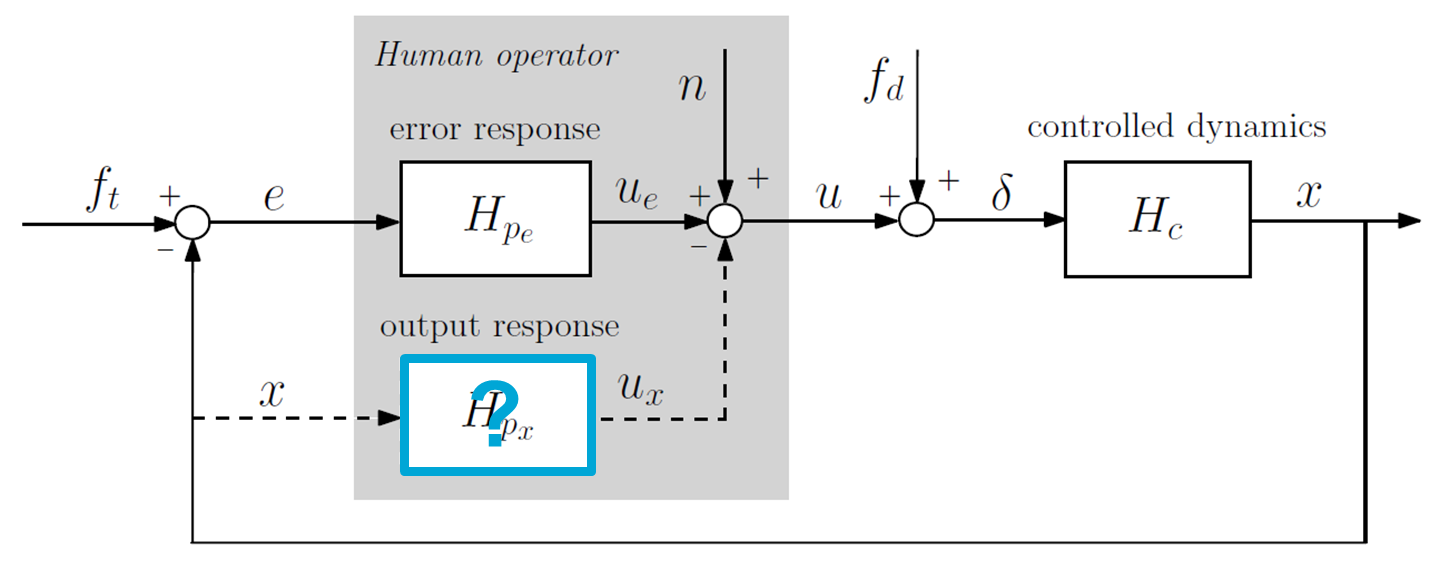
System identification and parameter estimation techniques are used to find, derive, and validate functional models that describe human control behavior. In general, system identification procedures require a priori selection of the model structure, meaning the system’s inputs and outputs. For human control modeling, this is problematic, as in many cases the exact (feedback and or feedforward) control organization used by human controllers is not clear in advance. Incorrect assumptions on which feedback and feedforward responses are used by human controllers will result in biased modeling results and over- or underparameterized models.
In this project, we develop objective methods for human control model structure selection, that is for determining whether feedforward control or responses to motion feedback are actually being utilized by the human controller. So far, we have focused on developing a systematic approach that uses a linear-time invariant models (e.g., ARX) for system identification, in combination with an objective model selection criterion based on the well-known Akaike and Bayesian Information criteria. With careful tuning of the selection criterion, this approach is very successful in minimizing false-positive and false-negative identification results for questionable human control responses. Furthermore, when applied to human-in-the-loop data from experiments involving human feedforward control and degraded use of motion feedback in flight simulators, this implies more objective judgements and evaluations on human manual control can be made.