Demonstrations
Demo of Incremental Nonlinear Control Allocation
Play Video
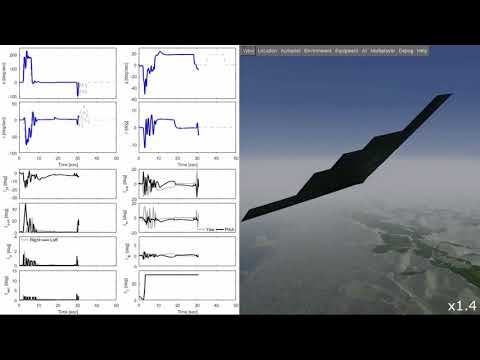
This video shows an demonstration of the Incremental Nonlinear Control Allocation (INCA) approach as applied to the Lockheed-Martin ICE model. The ICE model presents a particularly challenging Control Allocation problem as it is heavily overactuated (13 effectors) while the effectors also have strong nonlinear couplings. In the video, INCA is compared to standard (linear) control allocation approaches. Note that the visualization is not of the ICE model, but of the B2 which also is tailless.