Measuring and modeling how humans use preview information of a trajectory to follow for anticipation or feedforward control.
For decades, control-theoretic “cybernetic” models of human manual control behavior have facilitated a highly systematic design and evaluation methodology for human-machine interfaces. Today’s technology is being designed for higher levels of integration into human life than ever before, even up to a “symbiotic” level, where humans and machines continuously cooperate in a shared-control architecture (e.g., in modern cars). State-of-the art cybernetics theory is restricted mainly to human compensatory feedback control, and is inadequate for the design and evaluation of tomorrow’s novel human-machine systems.
This research project aims to fill one apparent gap in classical cybernetics theory, namely how humans use preview information of the future trajectory to follow for control. The clearest example of preview information is the road that is to be followed while driving, which is typically visible for some part ahead.
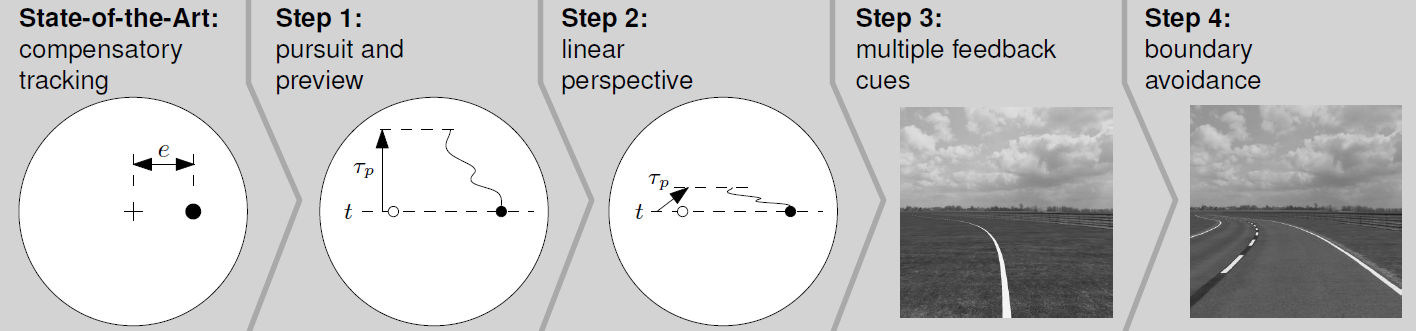
We take the well-understood compensatory tracking task as point of departure, working towards more realistic tasks in a series of human-in-the-loop experiments. First, we introduce preview in a plan-view laboratory display tracking task, and we investigate how task variables like the controlled element dynamics, the preview time, and the trajectory bandwidth affect human use of preview information. We then stepwise introduce elements from more realistic control tasks, namely linear viewing perspective, vestibular feedback, rotational visual feedback (e.g., from optic flow), and we move from tracking to boundary avoidance. This culminates in a realistic driving task where all important control cues are available to the human controller. In each step, we apply rigorous frequency-domain system identification techniques to separately measure humans’ feedback control behavior and their response to the previewed trajectory. We also propose and validate quasi-linear models to capture the measured responses in each step.
Initial results are promising, showing that much of how human controllers use preview can be captured by a simple extension of McRuer’s famous crossover model.