Knowledge of motion perception is essential in the design of motion simulators. Self-motion perception can result from perceived vestibular and or visual cues. This project is about measuring motion perception thresholds, so only vestibular cues are presented to the subject. The threshold is the point where stimulus switches from undetectable to detectable. It is generally adapted that the processing information contains an Internal model of the environment, this ‘internal model’ is used to produce estimates of the observed variables. With a slowly increasing amplitude below threshold, the model cannot estimate the yet unknown input signal, until it clearly stands out of the background noise. With a slowly decreasing amplitude from well above the threshold, the ‘internal model’ can help to discriminate the signal from the noise to considerably smaller amplitudes. This phenomenon leads to the distinction of upper and lower thresholds.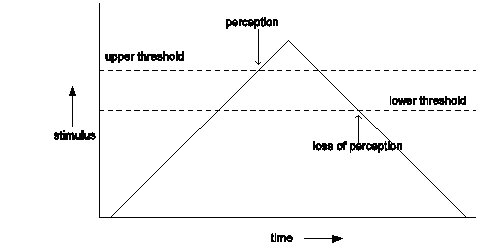
Experiments
The thresholds for motion perception measurements experiment will use the SIMONA Motion Performance Measurements (SMPM) software. This software was developed to evaluate the performance and characteristics of the motion system. The DirectMotionFilter is used within the SMPM software, this motion filter directly passes the VehicleCabMotion to the SimulatorMotionAcceleration. So it is possible to directly specify the motion of the simulator, and important applications for the DirectMotionFilter are motion system measurements and human perception experiments
Both angular acceleration and linear acceleration thresholds will be researched in the experiment. A run will consist of two parts, first the upper threshold detection and secondly the lower threshold part of the specific input frequency ranging from 0.1 to 2.25 Hz. The upper threshold is defined the value measured, with increasing amplitude, where the subject correctly identifies both the mode (pitch, roll or heave) and the frequency of oscillation. The lower threshold is defined the value measured when, with a decreasing amplitude, the subject is no longer able to follow the oscillation.
In 1978, Hosman and an der Vaart researched motion perception thresholds in a flight simulator. These experiments serve as a basis for this project, so the results from this experiment will be compared with the results obtained by Hosman ad Van der Vaart. Finally, the results will be compared with commonly used vestibular models which are used for pilot modeling.
References
[1] Heerspink, H.M., “Measuring motion perception thresholds on the SIMONA Research Simulator”. Unpublished preliminary graduation thesis, TU Delft 2004.