
EID for UAV swarming.
Advances in miniaturized computer technology have made it possible for a single Unmanned Aerial Vehicle (UAV) to complete its mission autonomously. This also sparked interest in having swarms of UAVs that are cooperating as a team on a single mission. But the level of automation involved in the control of UAV swarms will also significantly change the role of the human operator, who will shift from active controller on UAV level toward a supervisor on swarm level.
The new role also demands a new interface to support supervisory control strategies. Current UAV interfaces are still tailored to the control of single UAVs by portraying raw flight status data on cockpit-like instruments. Such interfaces will require the human to integrate low-level status information into higher-level mission constraints. For large swarms, this will become a cognitively challenging and most like an impossible task. But what if an interface can be designed that allows the operator to directly control high-level mission parameters on both swarm and individual UAV levels so as to successfully control large swarms at acceptable workload levels whilst maintaining a high level of situation awareness?
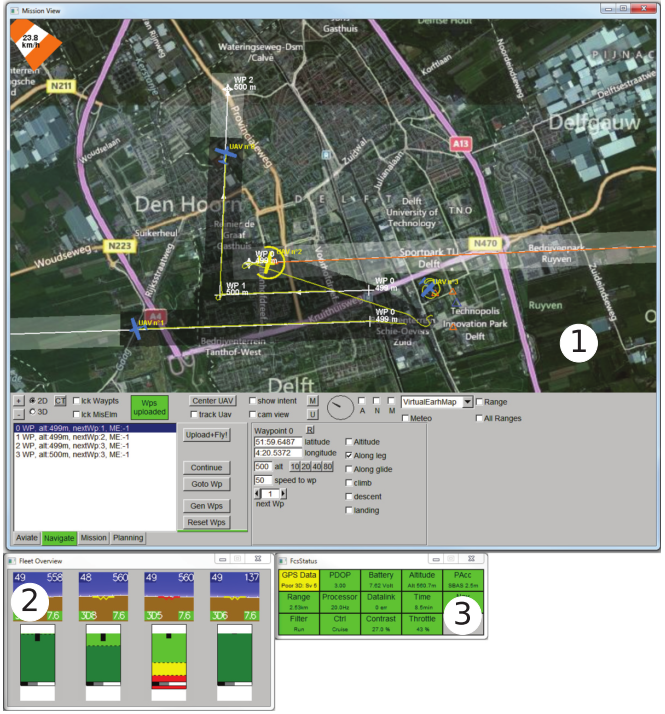
UAV interface with ecological additions. Depicted are mission view ①, fleet overview ② and flight control system status window ➂.